 English
English русский
русский Français
Français Español
Español Português
Português عربى
عربى
-
![Тандемский пресс -тормоз]()

Модель:
-
![NC Пресс Тормоза]()
Модель:
-
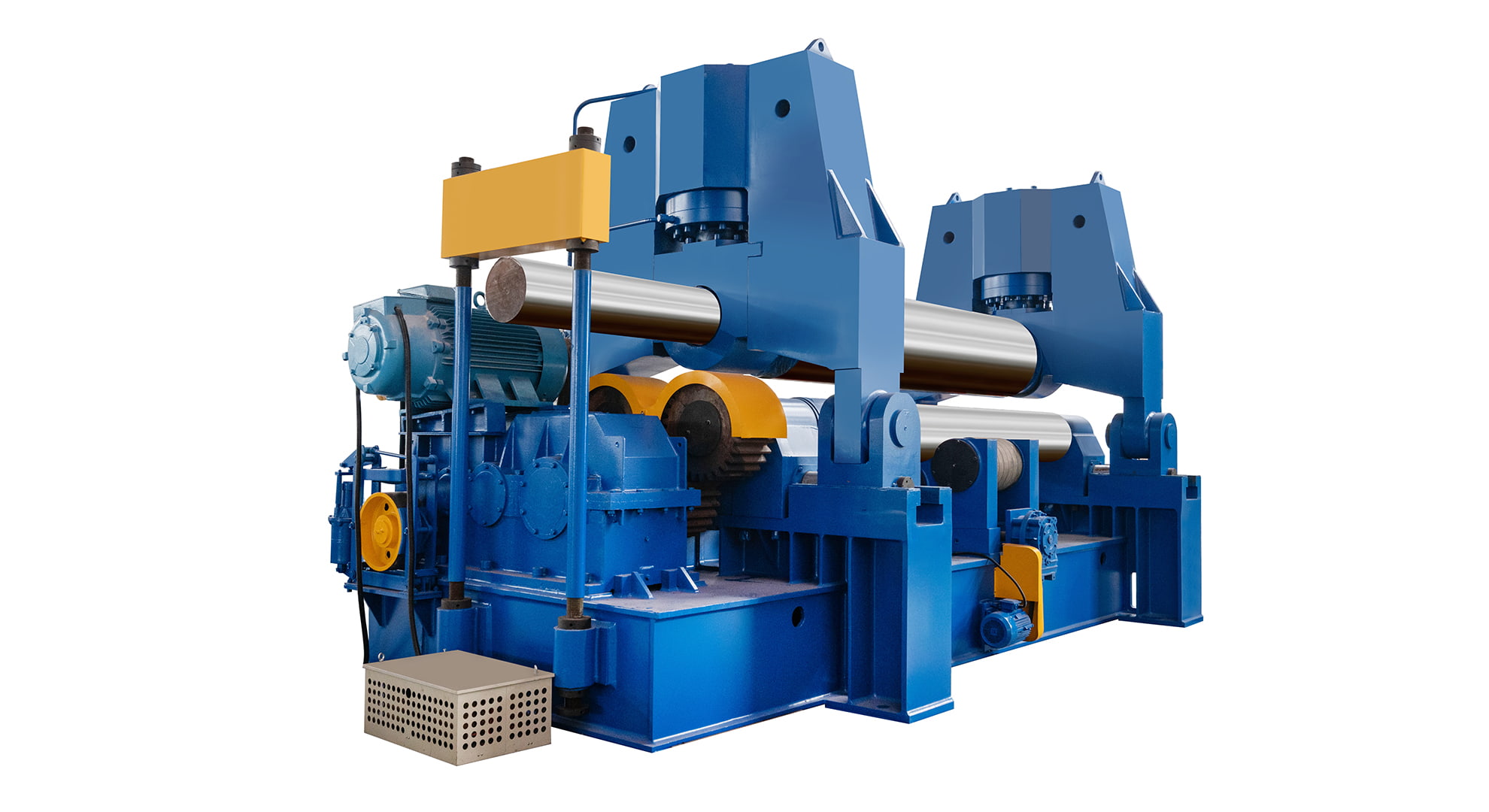
![4-х валковая прокатная машина]()
Модель:
-
![Гидравлический качающий пух]()
Модель:
Компенсация прогиба стола гибочного станка.
2024-05-22
1. Метод компенсации гидравлического цилиндра
Гидравлический автоматический механизм компенсации прогиба верстака состоит из набора масляных цилиндров, установленных в нижнем верстаке. Положение и размер каждого компенсационного цилиндра определяются в соответствии с кривой компенсации отклонения ползуна и анализом конечных элементов рабочего места. Гидравлическая компенсация достигается за счет относительного смещения между передней, средней и задней тремя вертикальными пластинами для достижения нейтральной версии компенсации выпуклости. Принцип заключается в том, чтобы реализовать выпуклость за счет упругой деформации самой стальной пластины, поэтому величину компенсации можно регулировать в пределах диапазона упругости рабочего места.
2. Метод механической компенсации.
Механическая компенсация заключается в добавлении выпуклого клина на рабочую поверхность станка, который состоит из группы выпуклых клиньев со скошенными поверхностями. Ее можно разделить на ручную и автоматическую компенсацию, клиенты выбирают дополнительную ручную компенсацию на станке Da41, а электрогидравлическая синхронная гибочная машина использует автоматическую компенсацию. Механическая компенсация рассчитывается системой ЧПУ в соответствии с величиной силы нагрузки при изгибе заготовки, а относительное движение выпуклого клина автоматически контролируется, чтобы зазор между верхней и нижней формами был постоянным при изгибе. и угол изгиба заготовки одинаковый в направлении длины.







Авторское право Nantong Tengzhong Machinery Manufacturing Co., Ltd. Все права защищены.
